一、实验介绍
本实验可进行水平定向钻机增强现实仿真实验,主要用于进一步训练学生对水平定向钻机的钻进工艺的熟练掌握程度和完整的工艺操作能力。
二、实验目的
1.熟悉水平定向钻机增强现实实训系统的软、硬件环境。
2.掌握水平定向钻机施工过程检测流程及方法。
3.掌握水平定向钻机导向孔施工工艺。
4.掌握水平定向钻机扩孔工艺。
5.掌握水平定向钻机回拖工艺。
6.掌握水平定向钻机的整套施工工艺流程。
7.掌握施工报告的撰写。
三、实验操作说明
步骤1:接通增强现实实训系统电源,将配套的增强现实实训系统地底模拟部分软件打开运行(用以观察操作钻机的钻进过程)。
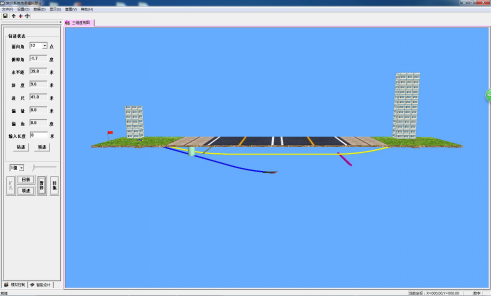
图1 配套增强现实实训系统地底模拟部分截图
步骤2:扭转钥匙打开虚拟钻机模型界面(无可视化操作面板,可显示孔底钻进参数并针对导向和扩孔两个工艺进行钻机操作评分考核,其中回拖铺管与扩孔操作基本一致)。
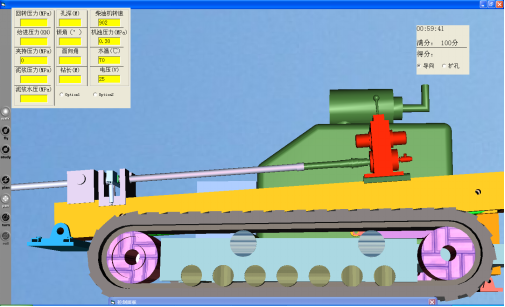
图2 可显示钻进参数与评分的虚拟钻机界面
(后续步骤与前述虚拟现实实训系统基本一致,区别在于用实际操作台替换了操作面板,并增加了油门、泥浆泵等操作)。

图3 座椅与部分操作手柄
步骤3:钻机移动。操作履带行走手柄,钻机模型模拟钻机的移动过程。
步骤4:钻机定位。操作支腿手柄伸出支腿,将钻机定位。
步骤5:调整入射角。操作起塔手柄调整钻机入射角度,钻架角度设置范围在0-20度,超过范围将出现警告提示。
步骤6:调整泥浆泵的档位。操作开关为两个三位开关,一个开关代表1档和3档,另一个开关代表2档和4档,换档时先将两个开关置中位,然后根据需要切换到相应的档位。这种方式和现实中YWB—320/250/180型泥浆泵的工作方式一致。换档后再打开泥浆泵开关。
步骤7:钻进操作。根据需要采用两种方式进行钻进,一种是回转,一种是顶进。
回转操作先将回转手柄推到位,向前为正转,向后为反转。然后推动给进手柄,向前为给进,向后为回拉。同时给进手柄的位置还对应相应的给进速度,推到最前为最大,动力头移动速度最快,到中位时,动力头速度为零,静止不动。
顶进操作先将回转手柄推到位,观察前控制台小显示屏面向角参数,面向角将在1到12点变化,大约2s增加一个钟面角,当面向角变化到所需角度时,将回转手柄置中位,再操作给进手柄进行顶进。
步骤8:观察钻进轨迹。钻进过程中切换到实训系统地底模拟部分软件,观察导向轨迹的实时变化过程。
步骤9:撤回钻杆。当一根钻杆完成后,若对操作结果不满意,可以直接操作给进手柄至拉回端,钻杆就会重新沿钻架退回。
步骤10:分离钻杆。钻进校核正确后,下一步需要将动力头与钻杆分离,添加新钻杆,首先执行卸扣动作。操纵夹持器手柄将夹持器夹紧,操纵卸扣手柄分离钻杆模型。操纵回转手柄反转。当钻杆丝扣脱开以后,操纵回拉手柄,将动力头拉至钻架最后端,此时若按住给进快按钮,动力头将以双倍的速度移动,减少辅助动作时间。
步骤11:增加钻杆。操作辅助的添加钻杆按钮,虚拟模型动画模拟工人动作从地面抬上一根钻杆,并将前部的丝扣对正。
步骤12:拧紧钻杆。操作回转手柄正转,同时控制给进手柄发出给进动作,给进速度要慢,直到钻杆丝扣安装完成为止,使回转与给进手柄置中位,停止回转以及给进动作。
步骤13:操纵夹持器手柄松开夹持器,并将卸扣进行复位,使动力头模型与钻杆模型连接在一起,然后就可以继续钻进操作了。
步骤14:根据工艺需要重复步骤6至13。
步骤15:调回钻机角度,收起支腿,钻机移动回原位。
步骤16:扭转钥匙关闭虚拟钻机。